")
")
Организация поворота вибрационного робота вокруг вертикали
Автор: Михаил Андреевич Гарбуз
Организация: Математический институт им. В.А. Стеклова Российской академии наук
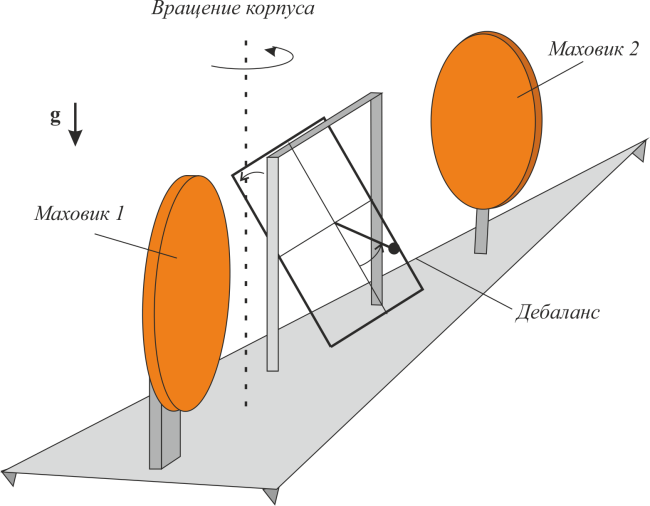
В настоящей работе рассматривается движение по шероховатой плоскости вибрационного робота [1], состоящего из корпуса, двух однородных маховиков и невесомой рамки с дебалансом – материальной точкой некоторой массы. Схема механической системы представлена на рисунке 1.
Двигающиеся части робота изолированы от внешнего воздействия, за счёт чего такое устройство может найти применение в условиях агрессивных сред, при тушении пожаров или на других планетах.
Задача маховиков состоит в том, чтобы поддерживать дно корпуса горизонтальным, обеспечивая нулевой крен и тангаж. Дебаланс движется по окружности в плоскости рамки, отклонённой от вертикали на установочный угол.
По аналогии с [2], для системы описаны две возможные фазы движения:
· Разгон, при котором корпус покоится за счёт силы трения, а дебаланс движется ускоренно и набирает количество движения.
· Полёт. Дебаланс замедляется и изменяет количество движения и кинетический момент корпуса, в результате чего нормальные реакции уменьшаются до нуля. Далее корпус устремляется за дебалансом и совершает перемещение с вращением вокруг вертикали.
Построена математическая модель плоскопараллельного движения. Показана принципиальная возможность управления дебалансом, результатом которого является поворот робота в горизонтальной плоскости. Описаны зависимости угла поворота корпуса от параметров системы. Определены условия полной остановки корпуса после совершения поворота. Проанализировано смещение корпуса из начального положения.
1. Блехман И.И. Вибрационная механика. М.: Наука, 1994.
2. M.Dosaev, V. Samsonov, S.Hwang. Construction of control algorithm in the problem of the planar motion of a friction-powered robot with a flywheel and an eccentric weight. Applied Mathematical Modelling 2021. V89 part 2, pp. 1517---1527