")
")
МОДЕЛИРОВАНИЕ МЫШЕЧНОГО ТОНУСА С СИСТЕМОЙ УПРАВЛЕНИЯ НА ОСНОВЕ СПАЙКОВОЙ НЕЙРОННОЙ СЕТИ
Автор: Анастасия Иванова
Соавторы: Балтин М.Э., Сабирова Д.Э., Балтина Т.В., Саченков О.А.
Организация: Казанский (Приволжский) федеральный университет
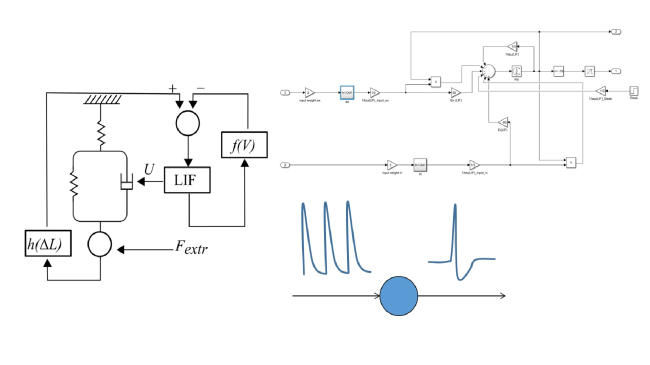
В работе описано решение задачи управления. В качестве объекта управления была выбрана модель мышечного волокна под действием внешней силы. Задача нейронной сети –найти вид функции управления, чтобы обеспечить сохранение мышцей заданного удлинения.
В качестве математической модели мышцы была выбрана трехэлементная
модель Хилла. Сокращение мышцы запускает демпфирующий элемент, поэтому управление будет подаваться на него. Изменение длины мышцы инициализирует воздействие на входные сигналы нейрона.
При моделировании была рассмотрена внешняя сила, растягивающая мышцу. При достижении некоторой пороговой величины растяжения сенсорный нейрон генерирует возбуждающие сигналы, которые приходят на мотонейрон, который описывается LIF моделью. Моторонейрон генерирует сигнал активации, вынуждая сокращаться мышечное волокно, и тормозит самого себя.
В работе численно исследовалось влияние силы воздействия на сократительный элемент мышечного волокна на поведение динамической системы.
В результате расчетов было найдено критическое значение, которое можно понимать как параметр бифуркации системы.